Archives
Les précédesseurs de l'Agayon en image...
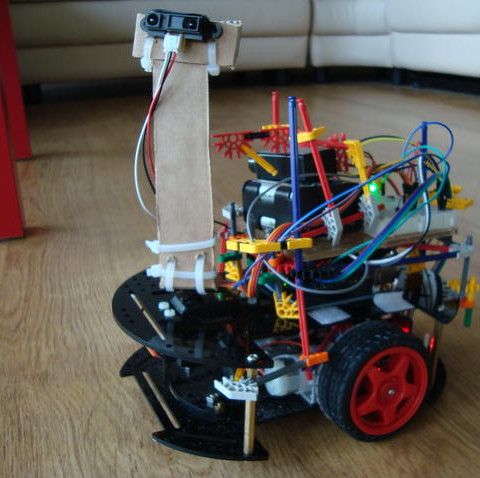
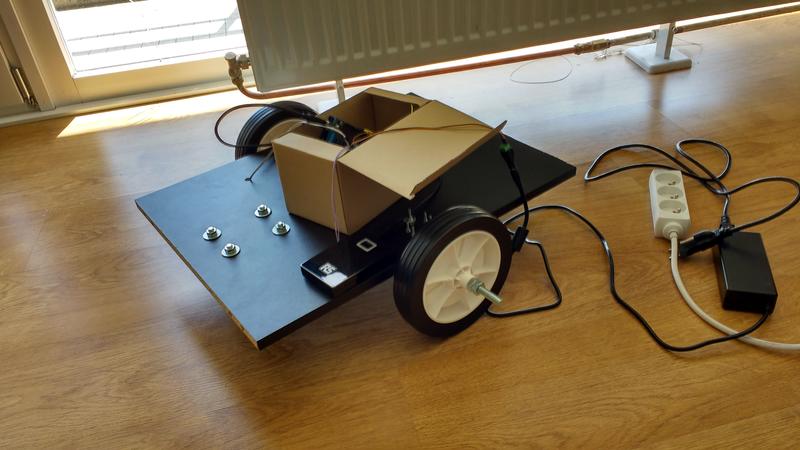
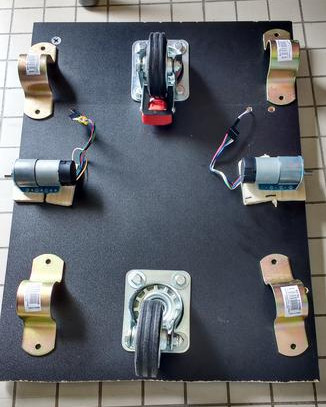
R1D2
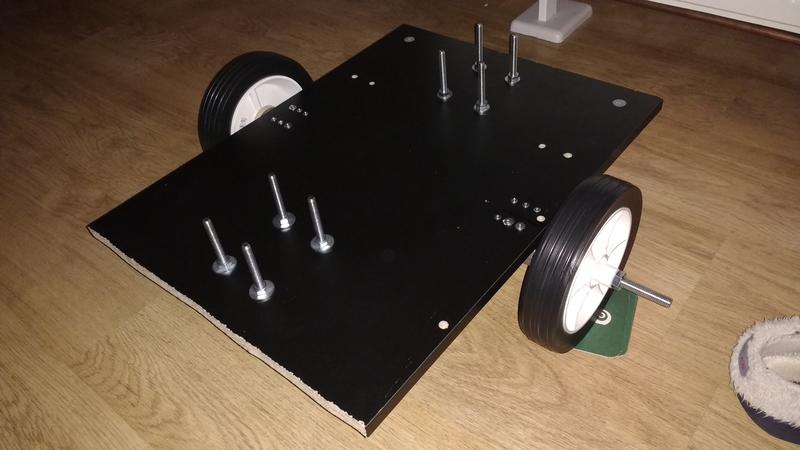
La version précédente de l'Agayon reposait sur un châssis moins robuste. Le nom de code a été incrémenté pour tenir compte du changement de plateforme mais le code est pour l'instant identique.




Anciens projets
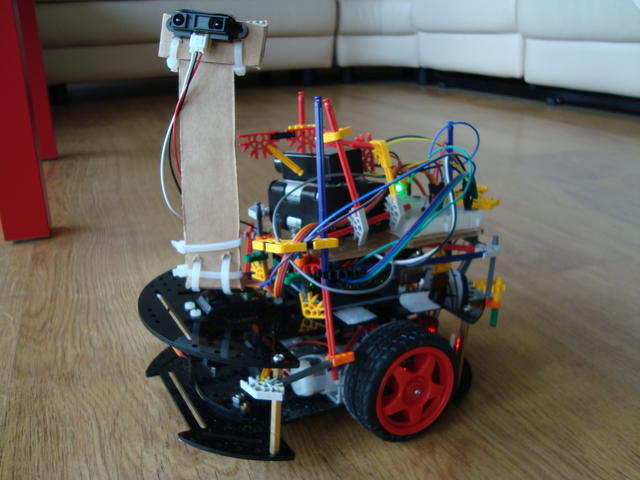
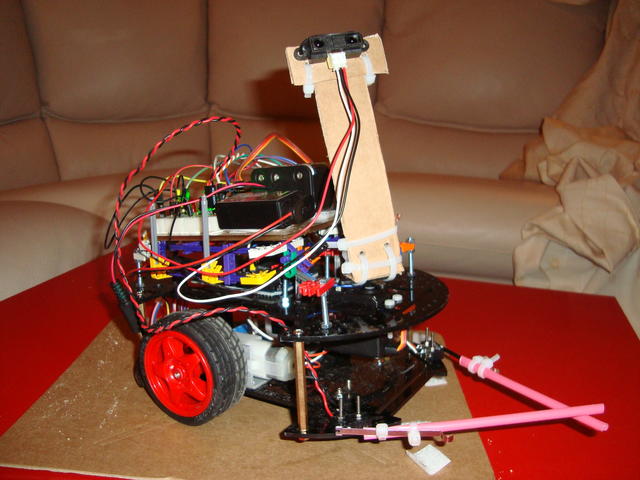
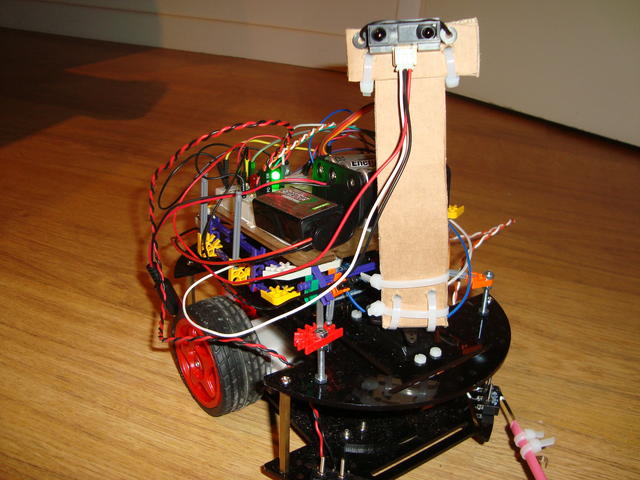
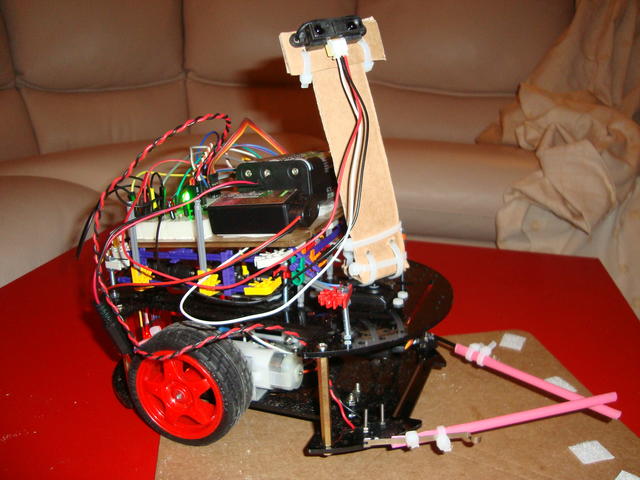
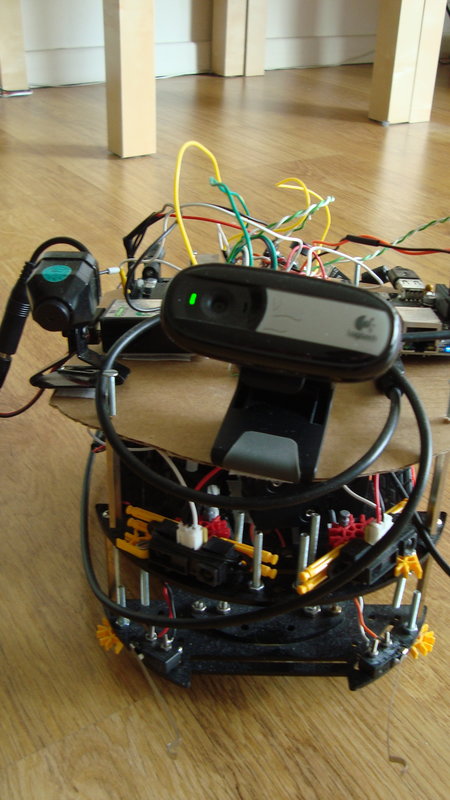
R1D1
R1D1 est le deuxième robot que j'ai réalisé. Il était capable de reconnaître le poing de l'utilisateur et de tourner sur lui même afin de le suivre. Il jouait de la musique à l'aide d'un buzzer. La page du projet est disponible sur gitlab: https://gitlab.com/r1d1/bbb/wikis/home.


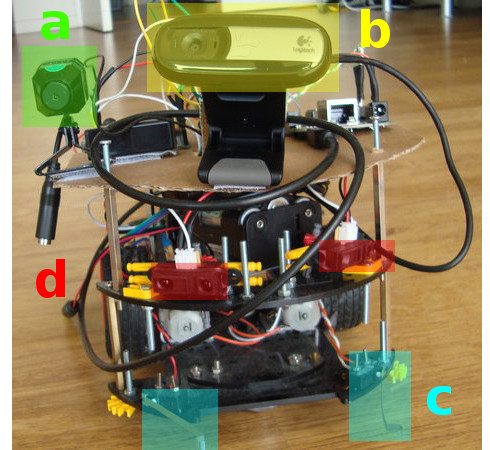
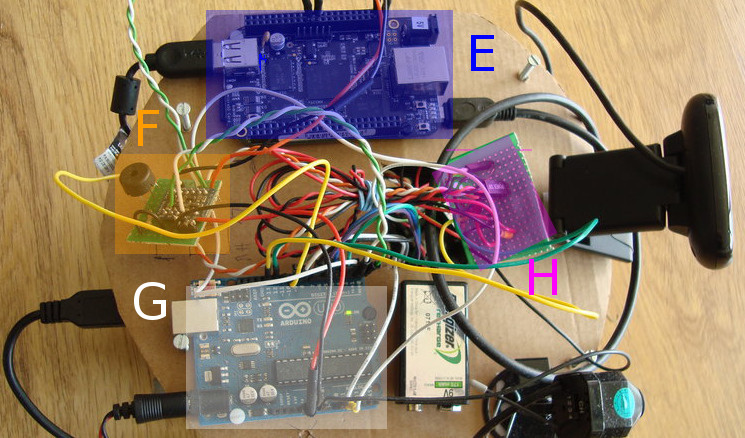
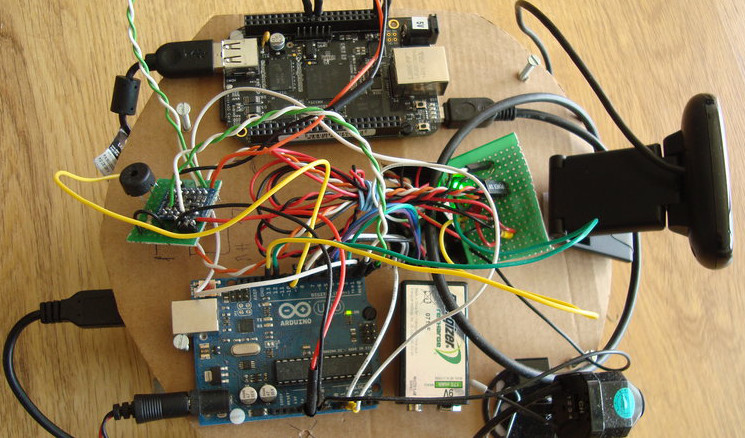
- a. Caméra espion dont l'image est retransmise sur la TV.
- b. Webcam
- c. Bumper: interruptions hardware.
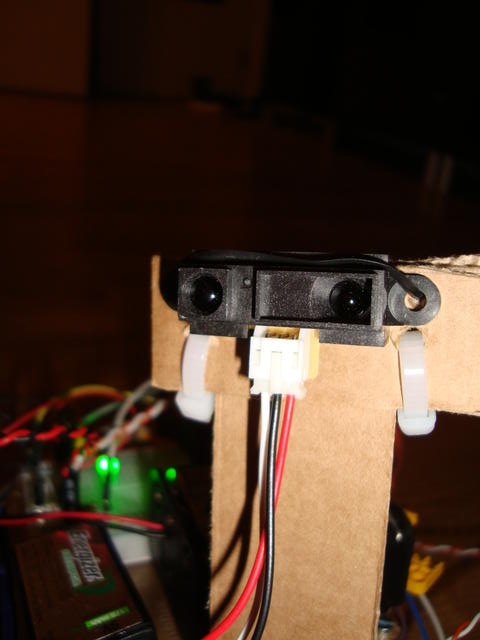
- d. Senseur de proximité infrarouge (Sharp GP2Y0A21YK0)
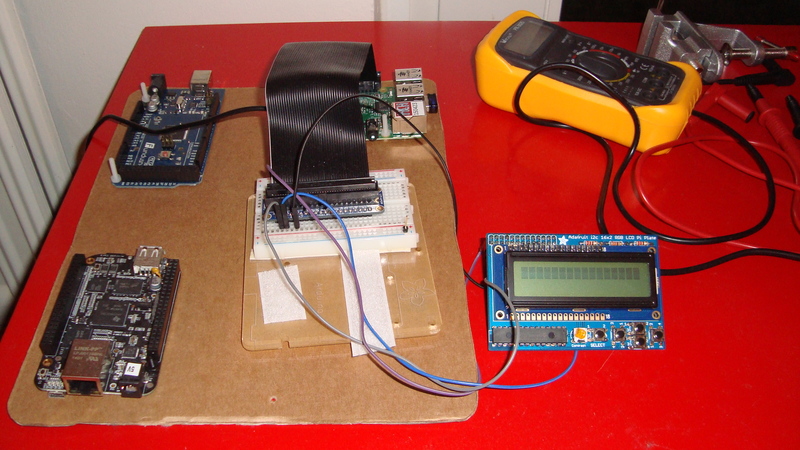
- e. Beaglebone black (BBB)
- f. Level shifter bi-directionel pour la communication série entre l'Arduino (5V) et le BBB (3.3V)
- g. Arduino Uno r3
- h. Perfboard (alimentation 5V et servos).
J.O.H.N.N.Y 5
Ce projet est le premier robot que j'ai réalisé. Son nom est J.O.H.N.N.Y 5 (Just an Other Horror Naked and Not Yet Finished: Indestructible Vile and Enthusiastic). Il détectait les obstacles et les évitait de manière fluide.